week15 <<
Previous Next >> week17
week16
個人線上考試:
MTB_robot 的取放方塊流程規劃(Process Planning):
1. Onshape 零組件繪製 (20%)
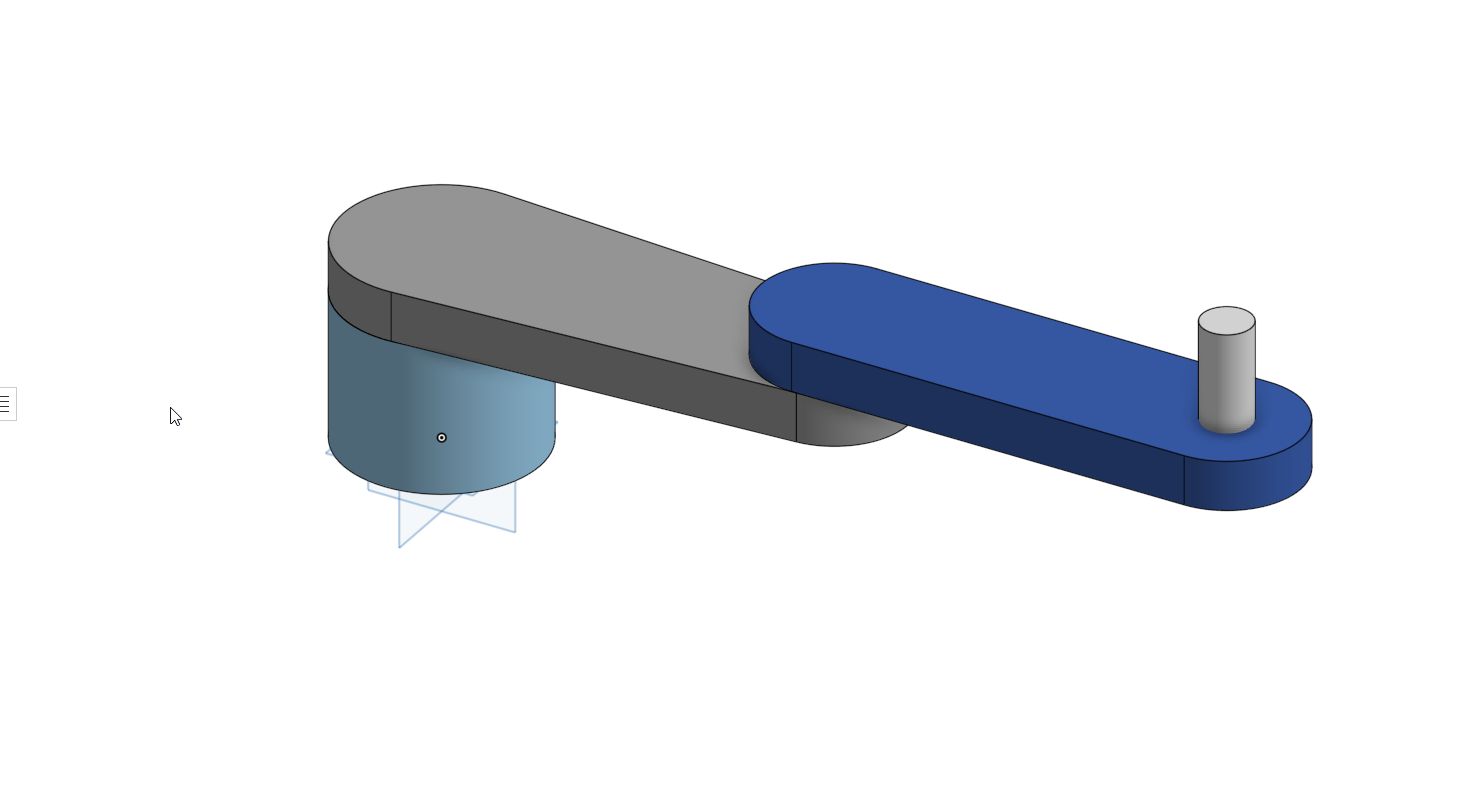
圖檔: https://cad.onshape.com/documents/d7b1dc65326df747f1b7adac/w/9d57b50f5e03b7e86733562b/e/bb104c31e8605d5f72f4f576
2. 建立 CoppeliaSim 4.1.0 MTB robot 場景 (20%)
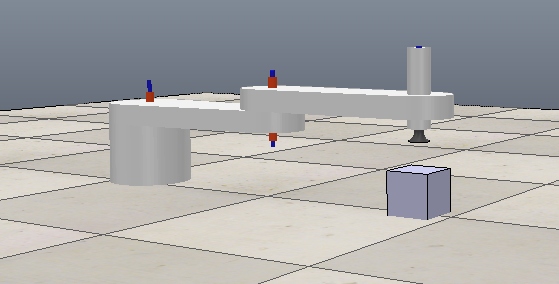
3. 手臂末端加入 components-gripper-suction pad 吸盤 (20%)
4. 逆向運動學函式 (20%)
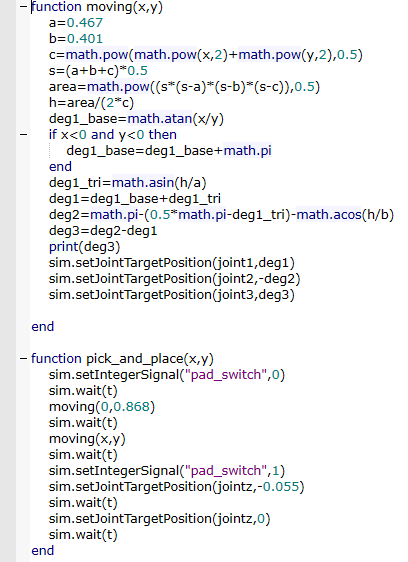 \
\
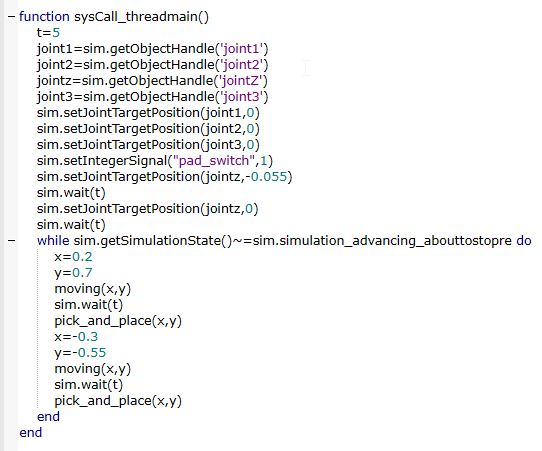
5. Python remote API 逆向運動學函式 (20%)
week15 <<
Previous Next >> week17